Author: Pony Tech
Autonomous driving is a system engineering that combines software and hardware. This article will interpret the hardware architecture of Pony.ai’s autonomous driving vehicles, their self-developed computing systems, and provide in-depth analysis of the hardware technologies required for the autonomous driving industry.
Review of Automotive Electronic and Electrical Architecture
The electronic and electrical architecture of traditional cars consists of Electronic Control Units (ECUs) and low-speed backbone networks. Each ECU can be considered to have its own processor, data communication pathway, power supply, communication, and wiring harness, making traditional cars extremely complex and expensive. The limitations of traditional automotive electronic and electrical architecture have been extensively analyzed by the industry, including (reference 1):
- Limited computing resources
- High communication costs between ECUs
- Complex wiring harnesses
- High deployment and maintenance costs
- Difficulty in supporting more complex cross-domain applications
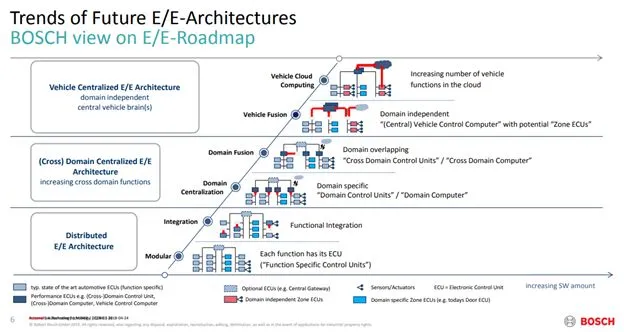
Traditional architecture cannot support future “new quad industrialisation” applications such as autonomous driving, which are more complex and therefore the automotive industry is actively promoting the evolution of centralized new electronic and electrical architecture (Figure 1), as well as the concept of “software-defined cars” (reference 2).
Pony’s latest generation of autonomous driving software and hardware system, as an L4 mass production solution, is evolving together with the overall electronic and electrical architecture of the vehicle. Pony has proposed its own autonomous driving hardware architecture to achieve the design concept of high performance, safety, and efficiency.
Pony.ai Autonomous Driving Hardware Architecture
As previously mentioned, the automotive industry has proposed the evolution of centralized electronic and electrical architecture. Let’s first analyze whether the centralized architecture is suitable for the current stage of autonomous driving development and deployment, and then introduce Pony.ai’s autonomous driving hardware architecture concept, implementation, and prospects for future hardware architecture.
2.1 Analysis of the Centralized Architecture
From the first version of Pony.ai’s autonomous driving hardware architecture, we designed it based on a centralized architecture, where all sensor data is fused and computed by a high-performance car-mounted computer, and the output is finally controlled by an actuator. With system iteration, we found that a single centralized architecture is not perfect, mainly for the following reasons:
2.1.1 Computing Efficiency
Submitting all computing tasks to a centralized car-mounted computer is not the most efficient way. The industry has multiple general-purpose and specialized processors. Reasonable heterogeneous computing and pre-processing, which distribute the massive data and computing tasks of autonomous vehicles, can achieve higher computing efficiency, reduce the computational power requirements of the central car-mounted computer, reduce overall power consumption and improve reliability.
2.1.2 Bandwidth and Wiring HarnessesCompared to traditional ECUs mounted on low-speed buses, the centralized architecture of the central computer in the autonomous driving system tends to directly link the sensors to the car computer for unified calculation, which requires high system communication bandwidth.
Although the automotive industry has already implemented gigabit Ethernet as the backbone network, there is still great pressure for the large number of high-resolution sensors used in autonomous driving. At the same time, the sensors of autonomous driving are distributed in various positions on the vehicle body. Connecting data and even power back to the central computer does not achieve the expected optimization of the harness.
2.1.3 Flexibility
The hardware devices of autonomous driving are still in a rapid iteration stage. In order to evaluate different types and quantities of hardware devices, especially sensors, the central computer must reserve a large number of interfaces and computing power to adapt to the flexibility of current autonomous driving development. However, this may make the central computer over-designed and cumbersome.
2.2 Pony.ai Autopilot Hardware Architecture
2.2.1 Decoupling of Hardware and Software Development
Hardware development is naturally slower than software development. The Pony.ai autopilot hardware architecture hopes to release the iteration speed of the software by decoupling the development of software and hardware. On the one hand, it can quickly provide functional service updates through remote deployment and data collection by software, and remotely manage the overall hardware life cycle. On the other hand, hardware modules can be upgraded to continuously support new software requirements.
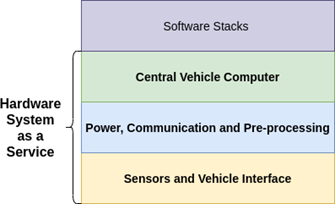
We abstract the hardware system into three parts:
1) Sensors and vehicle interfaces as peripheral devices of the system;
2) Power distribution and communication networks, and necessary preprocessing;
3) Central car-mounted computer.
The entire hardware system interacts with the software architecture as a service.
2.2.2 High Performance and Efficiency
The Pony.ai autopilot hardware system will provide a complete set of heterogeneous computing systems to perform efficient pre-processing and offloading and ultimately transmit the data pattern defined by the software algorithm to the high-performance central car-mounted computing platform with low latency and high bandwidth.
2.2.3 Safety and Reliability
Our hardware architecture is simple and reliable enough to support regulatory applications. More importantly, such an architecture can support advanced safety system design, such as real-time system health status monitoring, redundancy system deployment, and failure safety, etc.
2.2.4 Scalability and Upgradability
Through the expandability of the hardware system and the upgradability of the module, the Pony.ai hardware solution can be continuously updated during its product lifecycle.
2.2.5 Easy Deployment and Maintenance
Our goal is to provide a scalable and operable solution. The hardware architecture will be deployed and installed at a very low cost and will be easy to maintain in the later stage.## 2.3 Implementation of PonyAlpha X Hardware Architecture
Based on the background of the automotive industry’s electronic and electrical architecture, as well as Pony.ai’s autonomous driving hardware architecture concept, we propose a hybrid mode of central onboard computer with remote zone controllers.
In the development of PonyAlpha X, we start with system requirements and design, build a hardware system framework, and follow the V-model for development and validation.
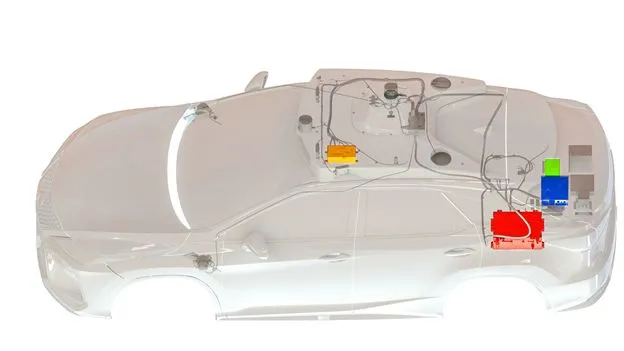
(Orange represents ZCUroof, green represents ZCUtrunk, blue represents PDU, and red represents the central onboard computer)
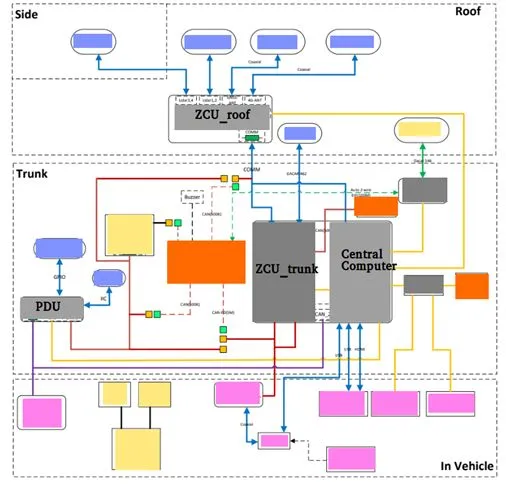
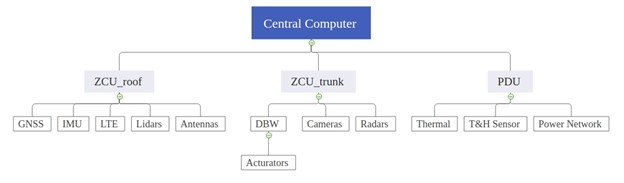
2.3.1 Zone Controller on Roof
The first zone controller on the roof integrates the GNSS and IMU data required for positioning, as well as high-bandwidth Lidar data, and provides communication services to external devices.
In addition to acting as a gateway for data access, the zone controller on the roof also takes on time synchronization, hardware monitoring, and partial data preprocessing. The existence of the zone controller on the roof greatly simplifies the wiring harness, making the roof and trunk completely independent, and greatly speeds up the vehicle’s modification and deployment.
2.3.2 Zone Controller in Trunk
The second zone controller in the trunk integrates high-throughput HD camera data, mmWave radar data, and provides a reliable interface for vehicle control.
Similarly, the zone controller in the trunk also takes on time synchronization, data preprocessing, and hardware monitoring. As the ZCU closest to the central onboard computer, it also undertakes necessary computing preprocessing and routing to make the overall computing hardware more efficient.
2.3.3 Centralized Power and Cooling Systems
The PDU in the trunk integrates power distribution and monitoring, as well as cooling control and temperature and humidity monitoring, to provide a reliable power supply solution and thermal management, enabling the entire Pony.ai autonomous driving hardware system to operate in the most suitable environmental state.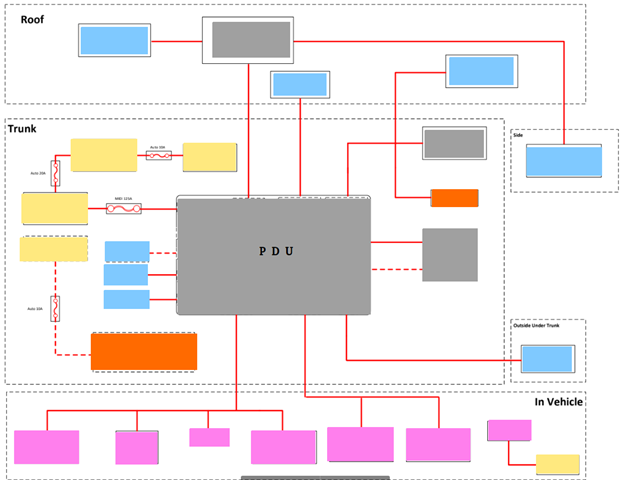
2.4 Outlook on Future Hardware Architecture of Pony.ai
PonyAlpha X marks an important milestone in the iterative development of Pony’s autonomous driving hardware architecture. In the future, the focus will be on:
-
Continuing to improve module integration, scalability, and ease of installation and maintenance
-
Enhancing fault monitoring and failure isolation capabilities
-
Enhancing system robustness to support more redundant designs
-
Abstracting data access and power distribution into a stronger ZCU for more efficient hardware architecture.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.