Author: HYZY
The previous article [“Mobileye Autonomous Driving Technology (Part 1): Starting from Zeekr001”] introduced the profiles of Mobileye and the SuperVision system on Zeekr001. This article will further explain some details of SuperVision.
Sensor Configuration
1. Configuration Plan
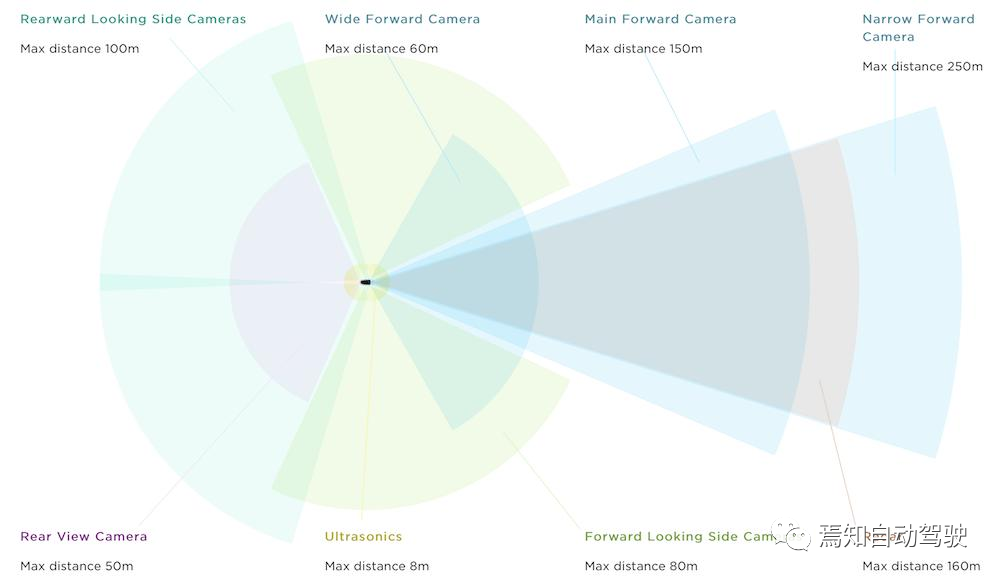
Similar to Tesla, Mobileye’s SuperVision system is also based on pure visual solutions. The sensors used for environmental perception in SuperVision can be seen from the following figure, with a total of 11 cameras and 1 millimeter-wave radar.

According to the public information of Zeekr001:
-
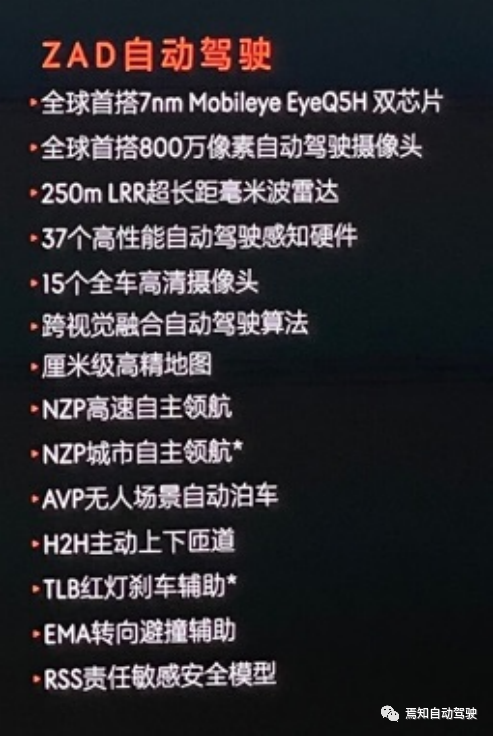
SuperVision’s 11 cameras use 8 million pixel cameras.
-
SuperVision’s front millimeter-wave radar is a 250m LRR long-range millimeter-wave radar.
2. Comparison with Tesla
Tesla’s sensor configuration is shown in the figure below.
It can be seen that Tesla’s sensor configuration is lower than that of Mobileye’s SuperVision, specifically:
-
Tesla’s cameras are 2 million pixels, while SuperVision uses 8 million pixel cameras;
-
Tesla’s front millimeter-wave radar is a 160m medium-range radar while SuperVision’s is a 250m long-range radar;
-
Tesla has no fisheye cameras, while SuperVision uses four of them.
In addition, Tesla uses three frontal monocular cameras while SuperVision uses two.
System Architecture
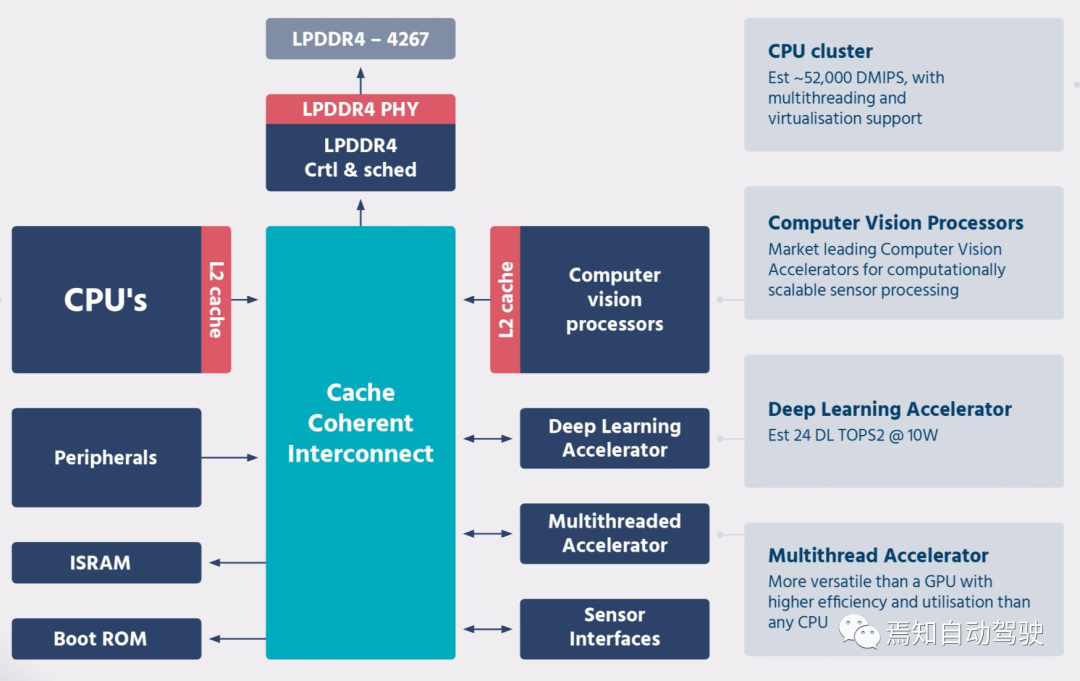
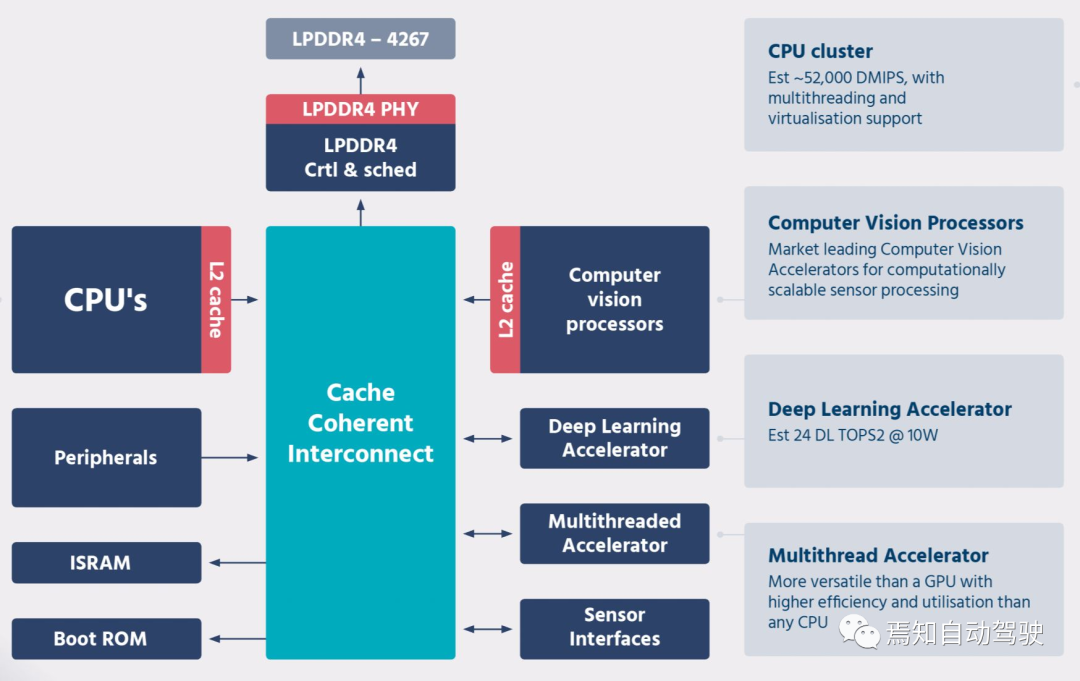
1. EQ5H Chip
The computing platform of SuperVision uses the latest generation of Mobileye’s EQ5H dual-chip which has a computing capacity of 48 TOPS (single EQ5H is 24 TOPS).The architecture of EQ5 chip includes four main modules, which are:
-
CPU;
-
CVP (Computer Vision Processors);
-
DLA (Deep Learning Accelerator);
-
MA (Multithreaded Accelerator).
2. SuperVision System Architecture
The SuperVision system architecture solution can be found in the figure below.
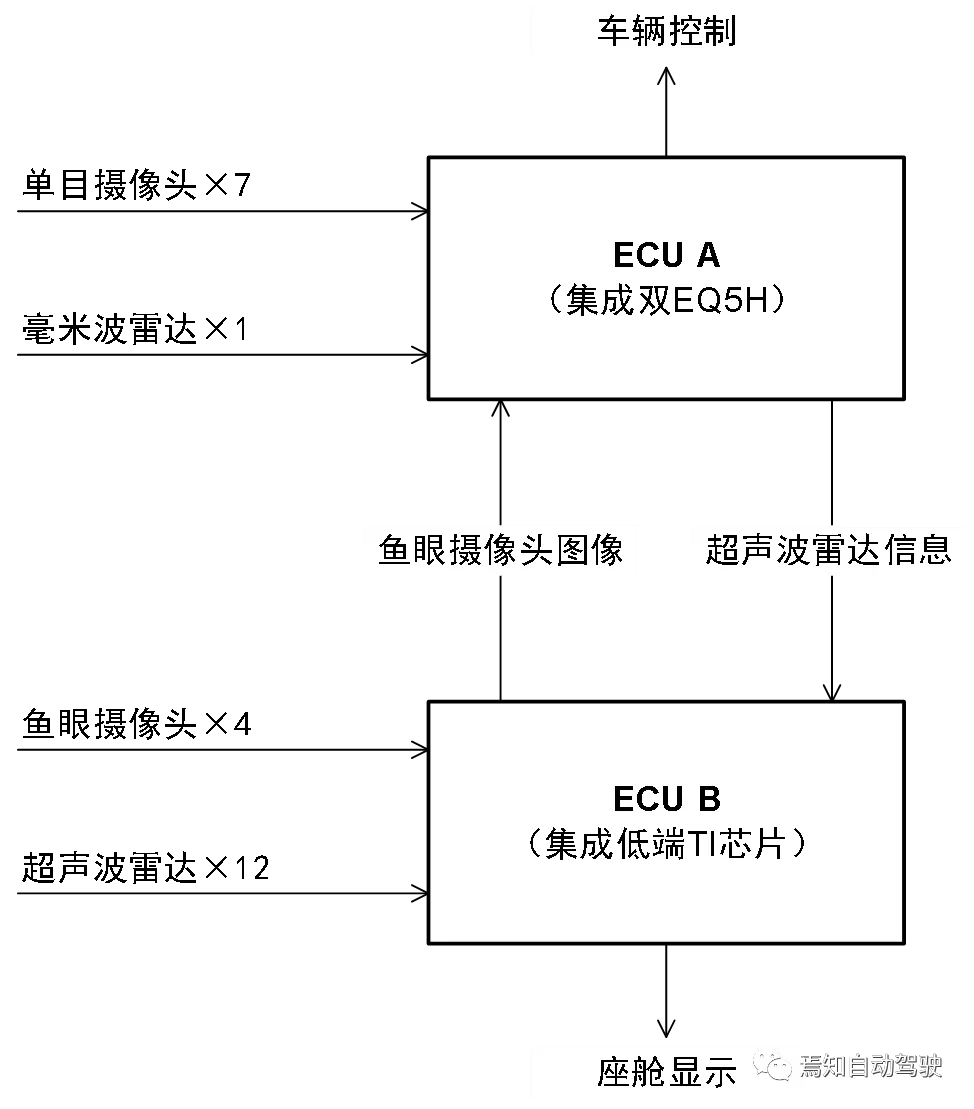
Because EQ5H does not have a GPU that can be used for stitching 360-degree panoramic images, the SuperVision system uses two ECUs:
-
One ECU integrating two EQ5H chips is used to implement the main functions of SuperVision;
-
Another ECU integrating a low-end TI chip is mainly used for processing 360-degree panoramic image stitching and outputting the results to the cabin display.
In such a SuperVision architecture, it is obvious that Mobileye will not provide a full solution. It will only provide ECU A, which integrates EQ5H, and other suppliers need to provide ECU B in cooperation.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.