In the previous sharing, I introduced the principle, data characteristics, and advantages and disadvantages of mmWave radar. The low environmental sensitivity and low cost of mmWave radar make it widely used in ADAS and autonomous driving fields.
Today I want to introduce an extremely common sensor — ultrasonic radar. If you find ultrasonic radar unfamiliar, it also has a more popular name — parking sensor.
During the process of reversing into a parking space and slowly moving the car, you can hear the “beep beep beep” sound inside the car, which is the feedback information given to the driver based on the detection distance of the ultrasonic radar.
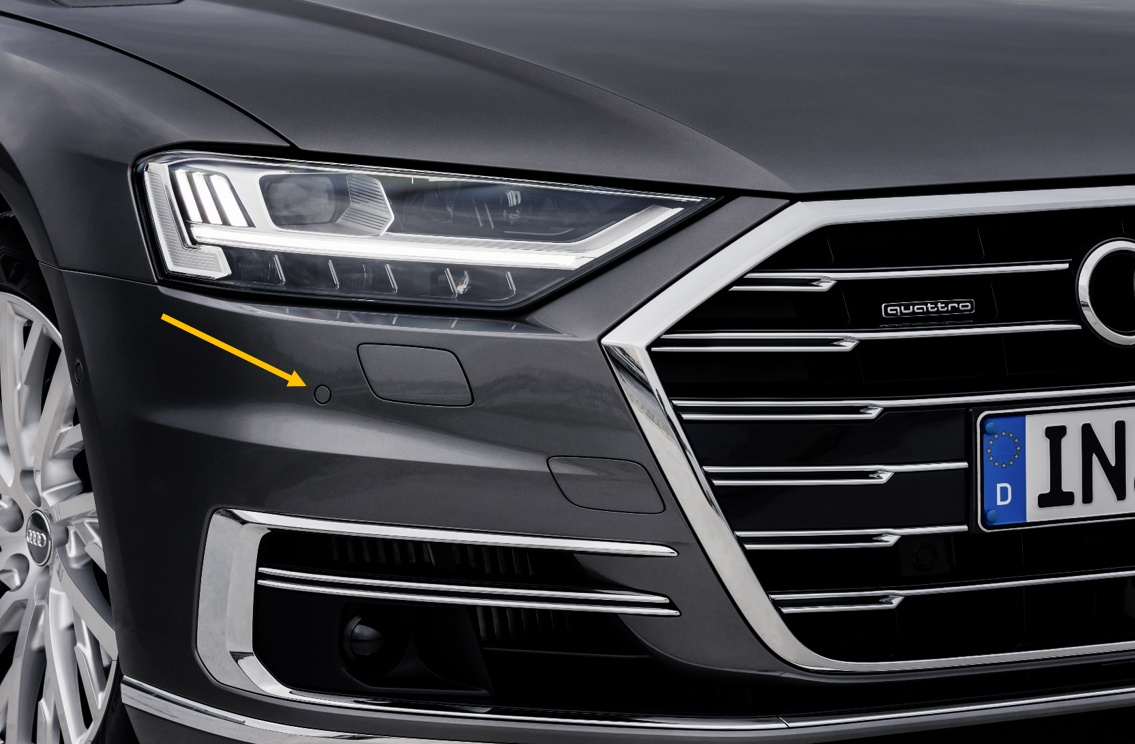
The car-mounted ultrasonic radar is generally installed above the car’s bumper, hidden in a certain position of the bumper. It looks like a yellow dot on the exterior of the car as shown by the yellow arrow in the figure below.

The appearance of the ultrasonic radar when not installed is shown below:

Types of Ultrasonic Radar
There are two types of commonly used ultrasonic radar.
The first type is installed on the front and rear bumper of the car, which is used to measure the obstacles in front and behind the car. This type of radar is called UPA in the industry.
The second type is installed on the sides of the car, used to measure the distance from the side obstacles. This type of radar is called APA in the industry.
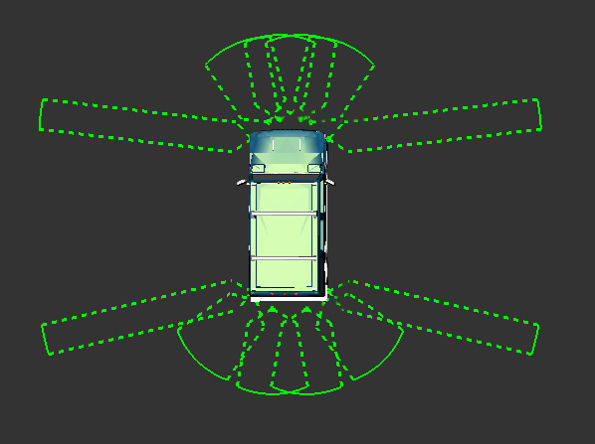
The detection range and detection area of UPA and APA are both different, as shown in the figure below. The car in the figure is equipped with a total of 8 UPA in the front and rear and 4 APA on the left and right sides.
UPA Ultrasonic Radar
The detection distance of UPA ultrasonic radar is generally between 15-250 cm, mainly used to measure obstacles in the front and rear of the car.
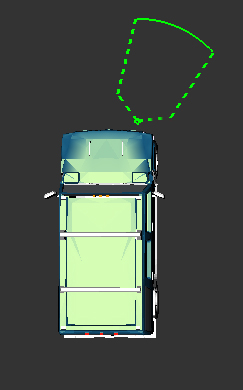
The following figure shows the detection range of a single UPA.
APA Ultrasonic RadarThe detection distance of APA ultrasonic radar is usually between 30~500 cm. APA has a farther detection range, so its cost is higher and the power is also greater compared to UPA.
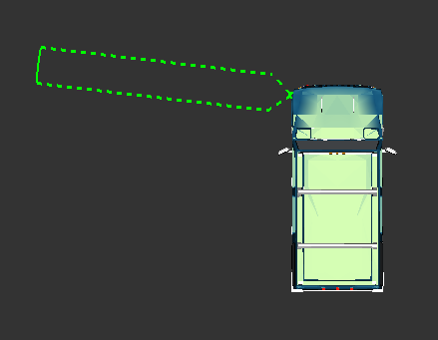
The figure below shows the detection range diagram of a single APA.
The detection distance advantage of APA makes it not only able to detect obstacles on the left and right sides, but also to determine the existence of parking spaces according to the data returned by the ultrasonic radar.
Mathematical Model of Ultrasonic Radar
Although there are significant differences between UPA and APA in terms of detection distance and shape, they can still be described by the same mathematical model. The state of an ultrasonic radar requires the following four parameters, and its mathematical model is shown in the figure below.
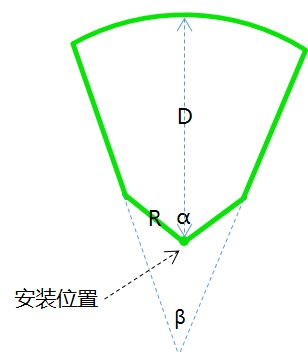
Parameter 1: α
α is the detection angle of the ultrasonic radar. The detection angle of UPA is generally about 120°, and the detection angle of APA is smaller than that of UPA, about 80°.
Parameter 2: β
β is one of the influence factors of the detection width range of the ultrasonic radar, and the angle is generally small. The β angle of UPA is about 20°, and the β angle of APA is quite special, which is 0°.
Parameter 3: R
R is also one of the influence factors of the detection width range of the ultrasonic radar. The difference between the R values of UPA and APA is not significant, both are around 0.6m.
Parameter 4: D
D is the maximum range of the ultrasonic radar. The maximum range of UPA is 2 to 2.5 meters, and the maximum range of APA is at least 5 meters. There are currently APA radars with more than 7m in use in the industry.
Characteristics of Ultrasonic Radar
Characteristic 1: Temperature Sensitive
The ranging principle of ultrasonic radar is similar to that of laser radar and millimeter wave radar introduced before, distance = propagation speed * propagation time / 2. The difference is that the wave speed of laser radar and millimeter wave radar is the speed of light, while the wave speed of ultrasonic radar is related to temperature. The approximate relationship is as follows:
C = C0 + 0.607 ∗ T, where C0 is the sound wave speed at zero degrees 332m/s, and T is the temperature (unit: ℃).
For example, when the temperature is 0℃, the propagation speed of ultrasonic wave is 332m/s; when the temperature is 30℃, the propagation speed of ultrasonic wave is 350m/s. The distance measured for obstacles in the same relative position is different under different temperatures.For autonomous driving systems with extremely high requirements for sensor accuracy, either conservative calculations of the ranging of ultrasonic radar or the introduction of temperature information into the system can be chosen to improve measurement accuracy.
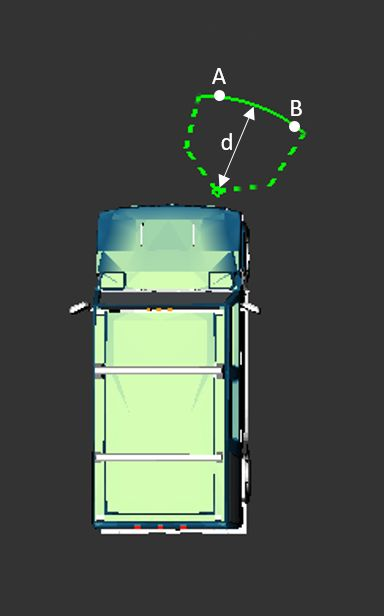
Feature 2: Inability to accurately describe the position of obstacles
When ultrasonic radar is working, it returns a detection distance value, as shown in the figure. The obstacles at point A and point B will both return the same detection distance d. Therefore, with only the information of the detection distance d, it is impossible to determine whether the obstacle is at point A or point B using the information from a single radar.
Applications of Ultrasonic Radar
The title of this article mentions that ultrasonic radar is an underestimated sensor because it can do much more than detect obstacles.
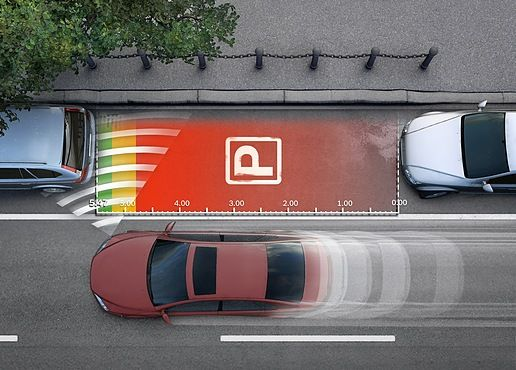
Application 1: Parking Space Detection
The automatic parking function needs to go through two stages: 1. identifying parking spaces; 2. reversing into parking spaces.
The function of identifying parking spaces relies on the installation of APA on the side of the vehicle as shown in the following scene.
When the car slowly passes the parking space, the relationship between the detected distance and time returned by the APA sensor on the right front of the car is roughly like the following figure:
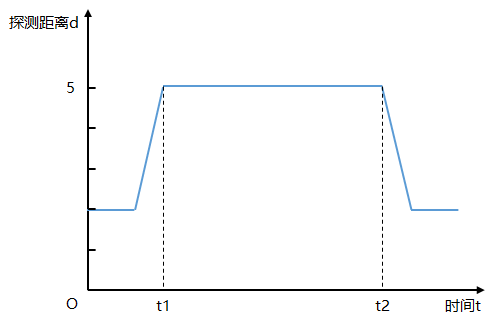
Integrating the vehicle speed from time t1 to time t2 can obtain an approximate length of the parking space. If it is assumed that the car is travelling at a constant speed, directly multiply the speed by (t2-t1). When the detected length exceeds the minimum length required for parking the car, the current space is considered to have a parking space.
Similarly, the rearward APA will also generate similar signal curves for secondary verification of parking spaces.
With parking space detection, the development of autonomous parking function is not difficult.
High-speed Lateral Assistance
Tesla Model S realized the cruising function on the highway in the AutoPilot 1.0 era. In order to increase the safety and comfort of the high-speed cruising function, Tesla also used the APA ultrasonic radar used for parking spaces in high-speed cruising.
First, let’s take a look at a video of Model S using APA. The image in the lower left corner of the video is a camera facing backwards from the car, and the image on the right is a perspective facing the direction of travel.
When the car on the left approaches the car closely, Model S autonomously adjusts to the right to reduce the risk of collision with the car on the left, ensuring that there is enough space on the right.
SummaryThe above content has provided us with a basic understanding of the data and working principle of ultrasonic radar. As the lowest-cost sensor on unmanned vehicles, exploring the potential of ultrasonic radar is what engineers are constantly thinking about.
Okay, here concludes the sharing of ultrasonic radar.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.