In my last post, I introduced the technical framework of the Baidu Apollo project, as shown below.
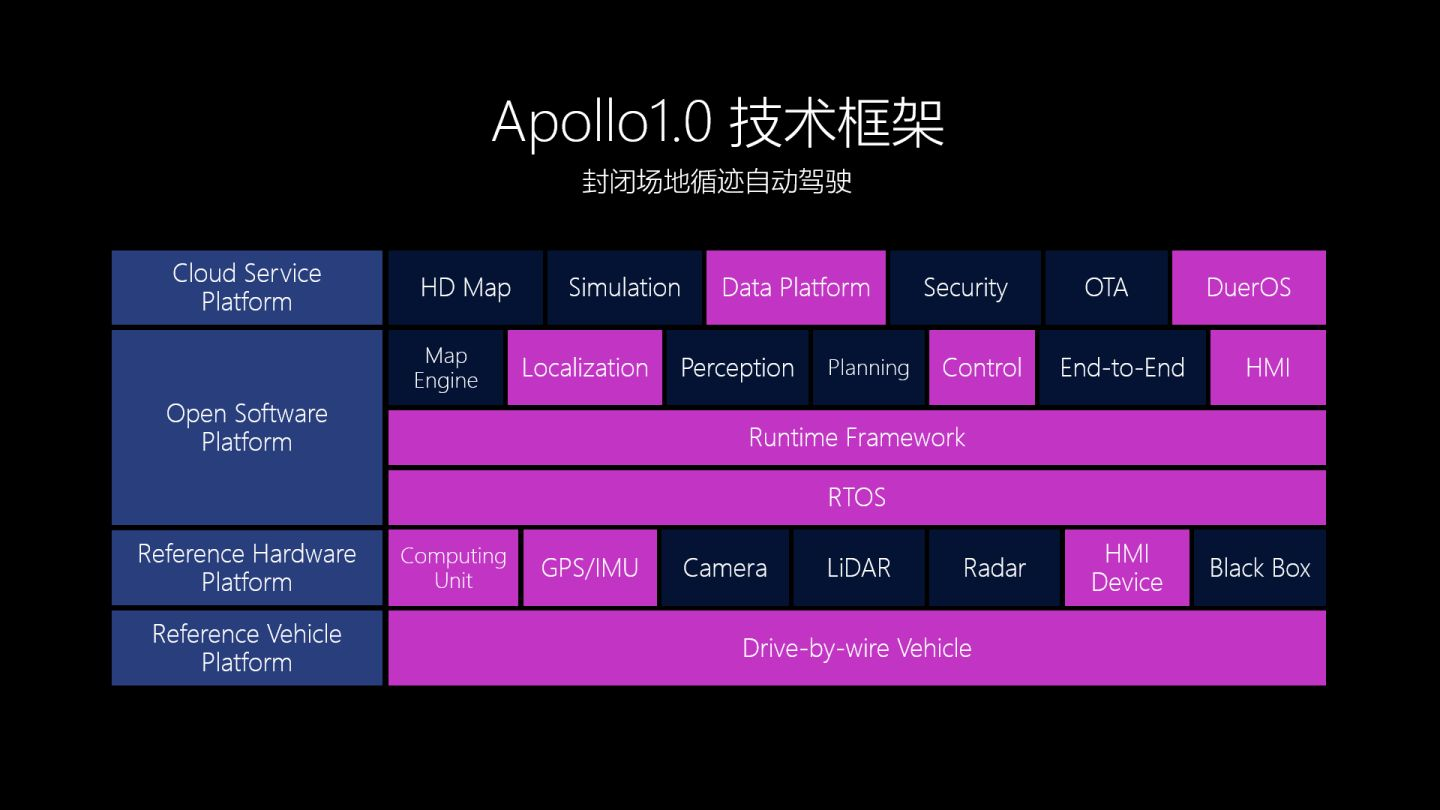
To achieve the “closed terrain trace automatic driving” function of Apollo 1.0, it is important to solve the problem of “where am I?” The answer to this question in the Apollo 1.0 architecture relies entirely on GPS (Global Positioning System) and IMU (Inertial Measurement Unit).
Today’s post will introduce the principle and characteristics of GPS in as simple language as possible, and explain why the positioning of unmanned vehicles not only relies on GPS, but also depends on IMU. In my next post, I will focus on introducing the function of IMU.
The principle of GPS positioning is very simple.
GPS, short for Global Positioning System, is commonly used in automobiles and mobile phones. The positioning accuracy of civilian GPS is between 10-20 meters. That’s why, when using GPS on your phone, you may be on land but appear to be in a river.
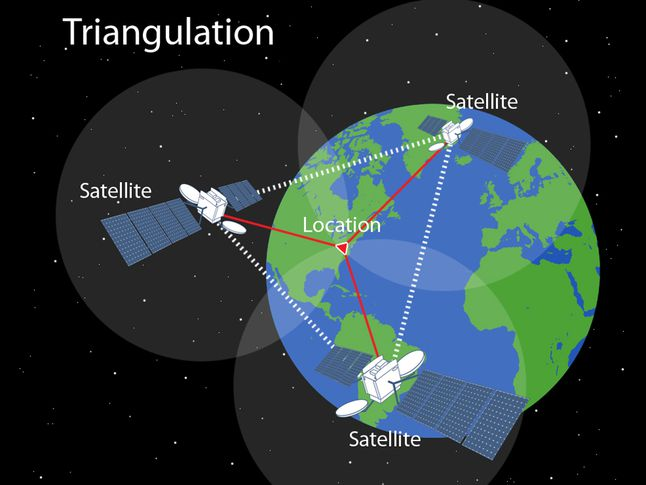
The principle of GPS positioning is very simple, called triangulation.
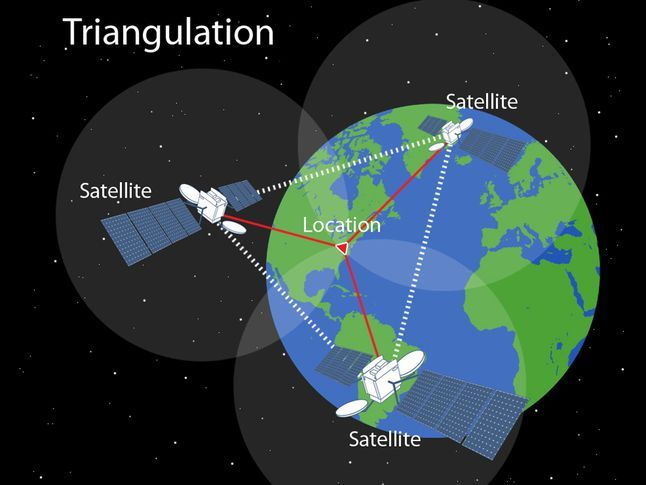
Source: https://www.nationalgeographic.org/photo/triangulation-sized/
The GPS receiver installed on the unmanned vehicle first measures the propagation time of the radio signal to the satellite, and then multiplies the propagation time by the speed of light to obtain the distance from the current GPS receiver to the satellite. With the distance, the location can be obtained based on geometric principles.
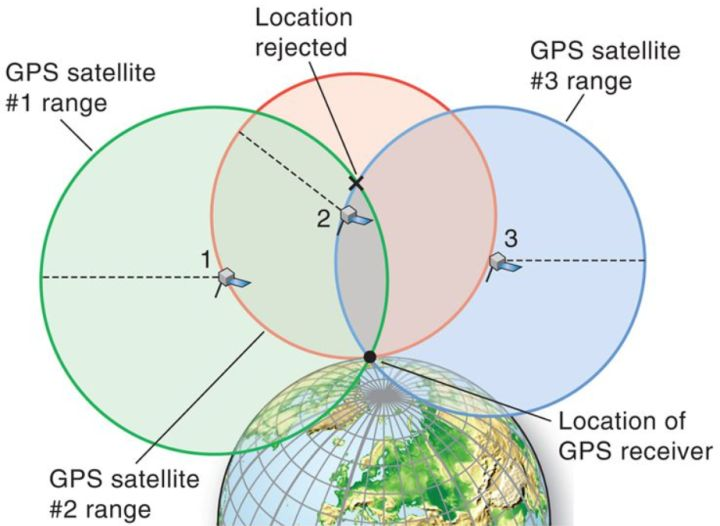
Source: http://slideplayer.com/slide/5717261/
If the distance from the GPS receiver to satellite 1 and satellite 3 is known, then two spheres are generated based on the distances (the green and blue spheres in the image), and the intersection of the two spheres creates a circle. Any point on the earth’s surface close to this circle could be the current location of the unmanned vehicle (GPS receiving device).Therefore, based on the two distance information, the specific position of the unmanned vehicle cannot be determined. By introducing the distance from the third satellite, the principle of trilateration can be used to accurately determine the position of the unmanned vehicle.
GPS Positioning Accuracy is Not Sufficient
According to the introduction above, it seems that as long as the propagation time of the radio signal reaching three satellites is obtained, the position of the unmanned vehicle can be calculated.
However, engineering problems are never as simple as theoretical calculations!
In an unobstructed and thin cloud layer environment, the propagation time of the radio signal multiplied by the speed of light is indeed close to the actual distance.
But the propagation time of the radio signal will be affected by the propagation medium. Factors such as the thinness of the cloud layer and the weather conditions will affect the propagation time, thereby affecting the calculation of the distance. The inaccurate distance will result in inaccurate positioning results.
In order to reduce the influence of weather and clouds on positioning, engineers introduced differential GPS technology. As shown in the following figure.
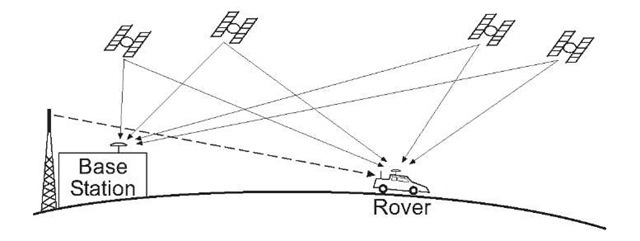
Image source: http://what-when-how.com/gps-with-high-rate-sensors/carrier-smoothed-code-gps/
A base station is established on the ground, which can obtain the accurate position information (latitude and longitude) of the base station when it is set up. At the same time, the base station has the function of receiving satellite signals.
When the GPS receiver of the base station and the GPS receiver of the vehicle are close (<30km), it can be considered that the GPS signals of the two pass through the same atmospheric region, that is, the signal error of the two is basically the same. Based on the accurate position and signal propagation time of the base station, the signal propagation error caused by weather conditions can be deduced. Then, using this error to correct the GPS signal of the vehicle can reduce the influence of clouds and weather on signal transmission.
Using differential GPS technology can improve the positioning accuracy of unmanned vehicles from the 10-meter level to the meter level.
Differential GPS can solve the problem of positioning accuracy, but it cannot solve the problems of obstruction and reflection.
When an unmanned vehicle is driving in an environment with tall buildings, the following problems will occur.
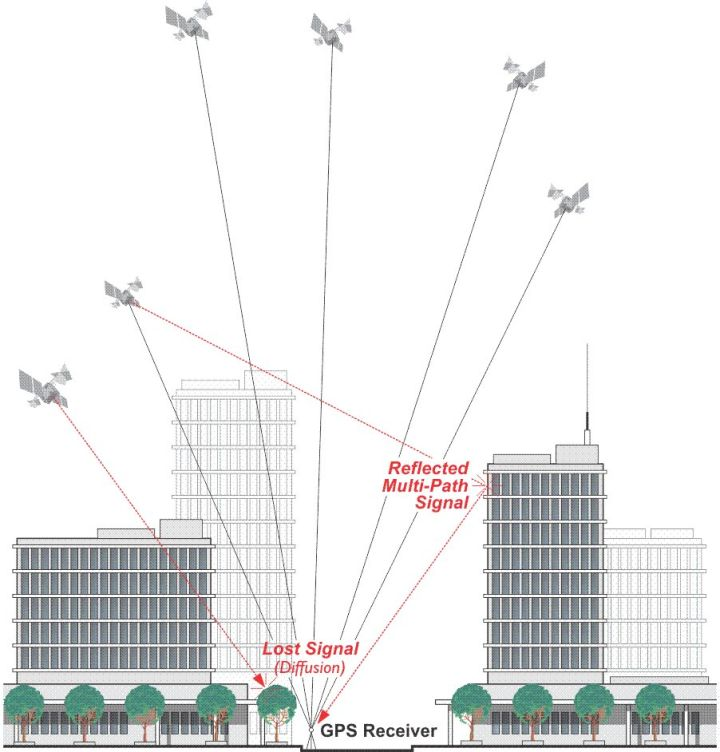
Image source: https://www.e-education.psu.edu/geog862/node/1721
Signal LossGPS receivers can easily lose a direction or all satellite signals around tall buildings, resulting in the positioning accuracy difficulty for autonomous driving based solely on the results of the remaining three satellite signals. This is due to the multipath problem where signals can be reflected by the building, causing inaccuracies in distance calculations. It is difficult for autonomous vehicles to determine whether the received signal is a single path or a multipath signal. Furthermore, the GPS position frequency is not high enough, only 10 Hz, resulting in the difficulty of precise positioning. In comparison, relying solely on GPS sensors in complex scenarios is insufficient for autonomous vehicles. To address this issue, engineers have introduced other sensor signals (IMU, laser, vision) to improve the positioning frequency of autonomous vehicles.If you want a more detailed understanding of the signal interface of GPS, you can refer to the Apollo public proto file at the following link: [ApolloAuto gnss.proto](ApolloAuto gnss.proto). In the upcoming software section, I will focus on analyzing these proto files. Stay tuned.
In the next sharing session, I will introduce how IMU works together with GPS to achieve stable positioning for autonomous vehicles.
So, this sharing basically gives everyone a rough idea of the GPS technology used in autonomous vehicles.
This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.