
It’s widely known that there are extensive technical differences in the perception field of autonomous driving technology. The multi-sensor fusion camp dominated by LiDAR and the vision-first camp dominated by cameras have engaged in a prolonged technical confrontation regarding the advantages and disadvantages of each. Recently, the leader of the LiDAR camp, Waymo, and the leader of the camera camp, Tesla, clashed again.
Indecent Attack
The latest clash can be traced back to April 22, when Elon Musk once again fired at LiDAR during Tesla’s Autonomy Investor Day.
Anyone relying on LiDAR is doomed. Expensive and unnecessary.
Why such uncivilized slurs?
Elon has always been unscrupulous and overbearing, and this personality is closely related to his ability to enter a new field, go against public opinion, and eventually achieve success over the past 20 years.
During Tesla’s Autonomy Investor Day, analysts questioned Autopilot’s technical route for the Nth time. Considering that Elon had taken over and directly led and recruited the Autopilot team since the end of 2015, this was not a question of the potential of cameras, but a question of Elon’s judgment on the technology’s prospects. Elon, who had explained this repeatedly, finally erupted, which was not surprising.
With Elon stirring up trouble, many professionals from the LiDAR camp responded. However, Waymo, which many eagerly anticipated to get involved, remained silent at that time.
Waymo waited for the opportunity and hit back comprehensively at the Google I/O 2019 conference on May 8. Waymo CTO and VP of engineering, Dmitri Dolgov, and Waymo Chief Scientist, Drago Anguelov, started to counterattack.
Removing LiDAR and instead relying solely on cameras is “very risky.”
You could imagine a solution where vision is sufficient, but you need the best vision out there. So it’s a very, very big gamble to have a vision-only system and one that we just don’t believe is required or necessary.
Anguelov believes that LiDAR helps Waymo create a safer user experience.
We have richer and more accurate data. We can build around better simulation environments. It helps us understand how cars and other objects interact with each other on the road. If you use only vision, all of this is much harder, and there are more limitations.“`
Dolgov’s response has put Tesla in a difficult situation.“We’re not either/or when it comes to cameras and LIDAR, we have both. Everything we do is about taking the world as seen by both sets of sensors and combining them in a way that makes sense, in a way that is understandable, so that we can have the safest, most powerful system.”
“There’s nothing fundamentally expensive about LIDAR. We’ve dramatically reduced the price of LIDAR from the first generation all the way to the current generation. You can imagine as we scale, the cost will come down more.”
“We have a roadmap and some plans to expand our (autonomous ride-hail) service beyond Phoenix.”
(In December 2018, Waymo launched autonomous ride-hailing service Waymo One within a confined area in Phoenix, Arizona in the U.S.)
Elon lost his patience with Waymo’s responses and chose to end the battle by saying, “Any customer who purchases a Tesla with full self-driving capability will be able to drive it from their home to their office (or anywhere else) with zero input by the end of this year.” (The details in the parentheses are from Elon’s previous statements about Autopilot.)

Watching these world-class scientists and technical experts bicker over inconsequential matters in the field of autonomous driving has made me feel very disappointed. This is not good. Self-driving cars are a new concept, and we should help ordinary consumers understand why the disagreement between Waymo and Tesla has little value and why the perception of different technological routes of self-driving will ultimately converge.
Waymo?
Let’s start with Waymo’s counterattack. It has to be said that no matter how Elon responds, Waymo’s precise strikes hit the nail on the head every time.
-
It is “very dangerous” to use only cameras without LIDAR.
-
We are more comprehensive and accurate, and everything we do is about being more powerful and safer.
This will create a perception in the minds of consumers that cameras are dangerous and LIDAR is safe. In reality, Tesla is not up against just Waymo alone. How large is the Waymo camp? The Verge’s headline says it all.

“`# IT’S ELON MUSK VS. EVERYONE ELSE IN THE RACE FOR FULLY DRIVERLESS CARS
The Tesla CEO is forging his own path toward full autonomy.
This is a face-off between Elon Musk and everyone else in the race for fully driverless cars.
Unlike most automakers and autonomous driving companies, Waymo has already moved away from purchasing the top-tier Velodyne LIDAR products and instead opted to follow an internal development route. Similar to Tesla’s in-house chip development, self-developed LIDAR technology has given Waymo a unique competitive edge.
For example, the cost of self-developed LIDAR for Waymo with the same performance is much lower than that of Velodyne. As early as the 2017 North American International Auto Show, Waymo CEO John Krafcik announced that Waymo had reduced the cost of LIDAR by over 90%.

Prior to developing in-house LIDAR technology, Waymo purchased Velodyne’s 64-line LIDAR at a cost of around $75,000. A decrease of over 90% indicates that Waymo has managed to reduce the cost to under $7,500.
Considering that Autopilot 2+ BOM costs are controlled at around $2,500, Elon can still maintain his existing attitude: Waymo’s work is effective, but LIDAR costs are far from commercial viability.
However, don’t forget that Waymo’s 90% drop was announced in 2017, and the LIDAR team has been continuously working towards improving performance and cost reduction.
On April 24th, Forbes revealed that Waymo is testing its next-generation perception system, including upgraded LIDAR and camera systems. Waymo has not disclosed details of the improved or upgraded LIDAR technology, but has confirmed that “the new sensor system has been tested in the Bay Area in recent weeks”.

If we review the various advancements made by Waymo over the past two years, we will find that the speed at which Waymo is commercializing is still quite impressive.
-
Waymo has reached purchase agreements for a total of 82,000 autonomous vehicles with FCA and Jaguar Land Rover
-
Waymo has actual road test mileage of more than 10 million miles and virtual test mileage of more than 7 billion miles
-
Waymo’s autonomous ride-hailing service, Waymo One, has been officially launched
-
Waymo has set up a factory in Michigan that is 100% focused on mass-producing Level 4 autonomous vehicles
In addition to the progress mentioned above, Waymo is also worth paying attention to for the following reason.
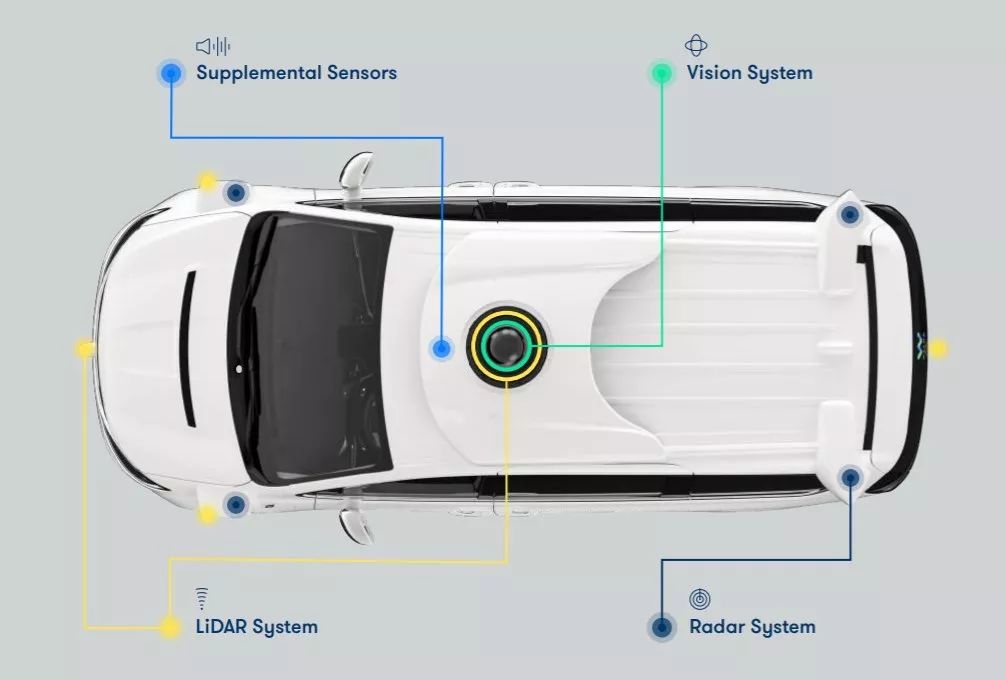
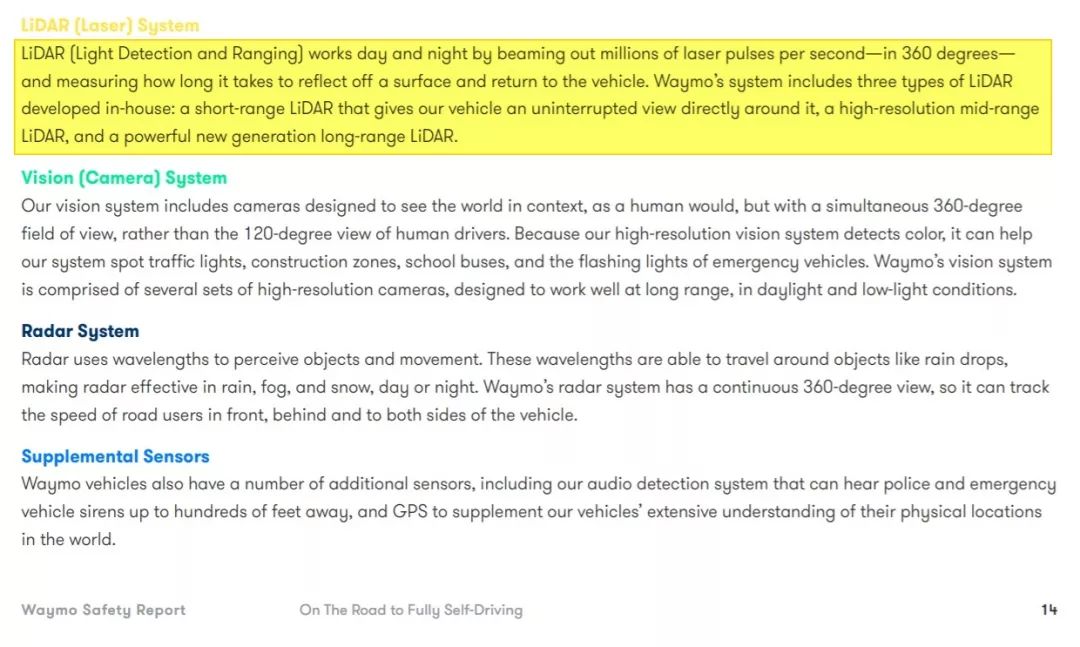
Apart from the roof-mounted LiDAR, Waymo has equipped its vehicles with short-range, high-resolution mid-range and long-range high-performance LiDARs at the front, back, left and right. Waymo’s confidence in its sensor capabilities comes from controlling the costs of developing its own sensors, which in turn sets the standard for autonomous driving in the industry.
How should we view Waymo? Waymo is solving one challenge after another on the road to commercializing autonomous vehicles; challenges such as the lack of crowdsourcing for large amounts of data, the high cost of LiDARs, and insufficient algorithm improvements.
General Motors’ Cruise is rapidly catching up and becoming a shining star. However, if we take a comprehensive view from the perspective of technology, cost, and commercialization, and leave aside Tesla which has taken an unconventional approach, the autonomous driving field can be divided into Waymo and the rest.
Tesla!
However, the real world does not allow us to overlook Tesla. Let’s talk about this company next. If you look closely at the argument at the beginning of the article, you will notice an interesting detail.# Waymo Chief Scientist Drago Anguelov Criticizes Tesla Using Only Cameras as “Very, Very Risky and Unnecessary”
According to Drago Anguelov, a computer science, artificial intelligence, and machine learning expert with a PhD from Stanford University, and the chief scientist at Waymo, “you need the best camera system to solve the problem” and “you can do it, but it’s a huge gamble” when it comes to implementing fully camera-based autonomous driving. In contrast, he criticized Tesla’s decision to only use cameras as “very, very risky and unnecessary”.
While recognizing the potential of camera-based perception and the boundaries of computer vision and AI technology, the challenges of achieving autonomous driving based solely on camera perception are enormous, but not totally unfeasible.
However, why does Waymo primarily rely on lidar for perception? This was determined by historical factors. When the Google self-driving car project began in 2009, AI technology had not made significant progress yet, directly leading to the impossibility of using primarily camera-based vision perception for autonomous driving.
So who gave Elon the courage to stand on the opposite side of the industry?
In 2012, the deep convolutional neural network powered ImageNet large-scale visual recognition challenge reduced the error rate which was then 16%, that was considered a breakthrough and became the starting point for a new wave of AI prosperity. This directly leveraged the rapid development of AI and computer vision recognition technologies.
Therefore, there are significant differences in perception systems between Waymo and Tesla.
Waymo relies primarily on lidar and point-cloud based perception, which is dependent on data collected by active sensors in 3D space points or distances measured to objects. Algorithms can derive structures through the density of the points, geometry, or patterns to detect objects, and accurately detect and identify failures.
Tesla relies primarily on camera-based vision perception and algorithms analyze pixel-based videos to detect vehicles, pedestrians and other obstacles in the environment. Algorithms can use geometry, optical flow, color, or other image features for detection.
In 2017, Waymo cited the key significance of lidar in their technology blog in this manner:
Our in-house developed lidar can differentiate real pedestrians from human-shaped posters, recognize 3D shapes, detect stationary objects, and accurately measure distance.
Therefore, the core challenge of camera-based perception for Tesla is to endow the cameras with lidar’s ability to identify 3D spatial objects. In other words, by segmentation of different pixels, giving autonomous driving systems the ability to recognize and understand the depth information of images.After Elon fired at LiDAR for one day, researchers at Cornell University published a study called “Pseudo-LiDAR from Vision for Autonomous Vehicles via 3D Depth Estimation”, in which they used low-cost, low-resolution stereo cameras to project 3D point clouds by inversely projecting depth pixels, vastly improving the quality of point clouds with an accuracy increase from 10% to 37.9%, approaching the average accuracy of LiDAR by 66%.
Considering that the study was based on a 400,000-pixel camera, which has a huge gap compared to the latest and highest-resolution camera systems, and without the application of model distillation or anytime prediction to improve detection accuracy and speed, the researchers found that the study has unprecedented improvements with broad prospects and potential.
So, how does Tesla do it?

On the day of Tesla’s autonomous driving investor day, Tesla’s official Twitter account posted a video with the caption “This 3D reconstruction shows that Tesla cars can collect a lot of depth information from a few seconds of video shot by 8 cameras.”
This is similar to the visual perception research at Cornell University.
Of course, there are still numerous problems that scientists and engineers need to overcome in autonomous driving perception. However, more often than not, these are shared challenges for LiDAR and cameras.
For example, in the case of pure white snow covering the road, the recognition capabilities of cameras for lane lines, road boundaries, road signs, and obstacles will be greatly reduced, and the density of the snow will also affect the reflection effect of the LiDAR, causing phantom obstacles that interfere with the perception ability of LiDAR.Therefore, whether it is based on lidar-based multisensor fusion or camera-based vision-dominant perception, fundamentally it is endowing machines with the ability to perceive the environment like humans. That’s why the divergence between Waymo and Tesla doesn’t have much value, and why the perception of different technological routes for autonomous driving will eventually converge.
There are still some highlights though. Who will win: the handsome and rich Waymo or the suited and booted outlaw Tesla?
Garage 42 is recruiting 1-2 automotive intern editors, located in Xuhui District, Shanghai. If interested, please send a resume and past work to d@42how.com.


This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.