This article is authorized by Cheyun (WeChat: cheyunwang) and the author is Yanjun Chao.
On June 28, at the 2018 Intelligent Automotive Cross-border Fusion Summit, Lang Xianpeng, the Director of Self-driving at Chehejia, first introduced the company’s unmanned driving strategy and shared travel strategy to the public.
Chehejia’s ultimate goal for shared travel is to create an unmanned Robo-taxi designed specifically for shared travel, whose autonomous driving level can reach SAE L4. The first mass-produced car is scheduled to be put into commercial operation in 2025, providing users with 100 million kilometers of travel services every day.
Since January of this year, Chehejia has chosen to establish its own team dedicated to the design, research and development, and productization of automatic driving shared travel solutions. Lang Xianpeng, a former employee of Baidu’s L3 business unit, joined Chehejia as the head of the self-driving department. Now that the core team construction has been completed, algorithm, data, and service related leaders have been put in place.
Among the many car companies that have released their autonomous driving timetable, Chehejia’s goal seems to be a relatively specific plan – to build a Robo-taxi (SAE L4) for mobile travel, mass produce it by 2025 and put it into commercial operation, providing users with 100 million kilometers of travel services every day. Unlike many companies that are experimenting with automatic driving R&D, Chehejia has raised unmanned Robo-taxi to the company’s strategic goal.
Lang Xianpeng pointed out to Cheyun that by 2025, Chehejia’s output would not be a “semi-finished product” for trial operations, but a mass-produced car that can be officially put into commercial operation. Although there may be safety personnel following the car during the transition period, the ultimate goal is an unmanned driving rental without a driver.
Robo-taxi is regarded as a commercial goal within the company. In March of this year, Didi partnered with Chehejia and will play an important role in this business plan.
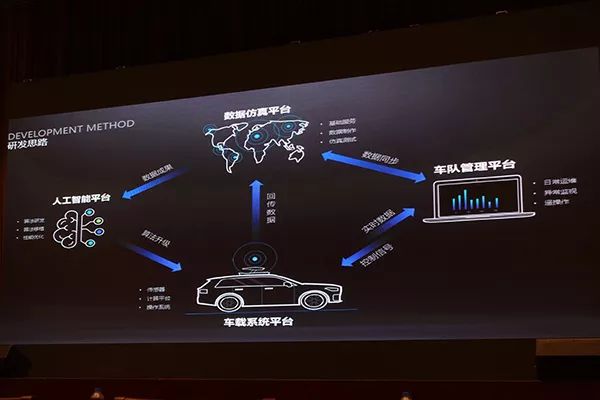
At that time, Chehejia’s self-driving system will be composed of four platforms: a complete vehicle system platform, an artificial intelligence platform, a data simulation platform, and a vehicle fleet management platform. All the data on unmanned driving taxis will be transmitted back to the data simulation platform through the network, and the artificial intelligence platform will be used for algorithm integration optimization. As the size of the fleet expands, there will be a vehicle fleet management platform to unify management.
“It’s not just about R&D, it’s about getting things done.” Lang Xianpeng commented on this goal, “it’s actually quite radical.”
“Software and hardware integration” is the fastest way
Compared to many companies that have set 2025 plans, both the car and the home face a significant challenge: to develop a self-proven product in a shorter time than anyone else. In answering this question, Lang Xianpeng chose “integration of software and hardware,” which, in his opinion, is the fastest way.
Prototype vehicles for autonomous driving are never in short supply in the industry. Lang Xianpeng told Cheyunjun that it is easy to quickly build a prototype car, and tech companies generally buy wire-controlled modified cars to develop software algorithms first and then transplant them onto regular cars. However, algorithms customized for different vehicles are not universal, and in the hardware adaptation stage, it is not uncommon for the R&D team to waste a lot of time when transplanting it onto a completely different car.
Lang Xianpeng gave us a simple example: when designing an autonomous driving decision-making algorithm for a car with a speed of 0 to 100 km/h in 3 seconds, it can choose to overtake in a certain scenario. However, when a poorly performing car is in the same position, it can only follow the car in front. The software algorithm changes with the different performance of the vehicle. In Lang Xianpeng’s opinion, developing through a Demo car and then transplanting it is not a particularly good R&D concept.
The “software-hardware integration” approach adopted by the car and home for autonomous driving R&D is to clarify what kind of autonomous driving car it is from the beginning. The entire car, from chassis design, redundant actuator and power supply design to interior space design, serves the ultimate goal. The location and type of sensors, choice of calculation platform, and algorithm all develop in parallel with the vehicle hardware, and there is no priority relationship. Although time is tight and the task is heavy, the approach chosen by the car and home is to develop an autonomous driving car from scratch.
Of course, in order to seize the 2025 timeline, the car and home also considered some efficient solutions. According to Lang Xianpeng, the first SUV to be launched by the company will be equipped with an L2.5 autonomous driving system similar to Tesla’s Autopilot, and the R&D work is mainly carried out by Yihang Intelligent Technology Co., Ltd., which is invested by the car and home.
This vehicle will play a very important role in driving behavior data collection during the Robo-taxi R&D process. Before this car is launched, the Lang Xianpeng team will complete the construction of the data platform, ensuring that data can accurately feed back when the new car is launched next year, and the OTA function will also be used first on this car.The team has remodeled the first batch of autonomous driving cars based on the first SUV framework. The main function of these demo cars is to get the data service, storage, distribution, and production technologies through, as well as prepare some universal algorithmic parts. When the Robo-taxi for the ride-hailing platform is released in the first half of 2019, the above-mentioned basic abilities will be transplanted to the customized Robo-taxi. Subsequently, algorithmic developments will be made on the formal cars.
The next phase has a specific timetable: after the completion of the Robo-taxi sample cars around 2019, Chehejia will complete the overall vehicle design in 2020, and will spend 1-2 years on perfecting algorithms. From 2023-2025, mass production will begin. Although the timeline is tight, Chehejia still has confidence as long as the software and hardware keep up with the progress.
Decision-making algorithms are the core capabilities that Chehejia has chosen for itself in the limited time and manpower. For L2 and L3 autonomous driving, the perception and execution aspects are the main focuses, and these two aspects are also close to maturity for L4 autonomous driving. However, decision-making and planning remain problematic. Compared with L2 and L3 ADAS with human intervention, L4 autonomous vehicles require fully automated decision-making and planning, which imposes higher demands for decision-making and planning capabilities.
To provide a brief introduction, the current planning and decision-making algorithms require extensive driving data for training. There are two research directions: rule-based and deep learning-based. The former designs mathematical formulas for the vehicle’s decision-making in certain scenarios, such as when to overtake or follow. The advantage of rule-based algorithms is their determinacy. However, with the increasing complexity of the world, it is challenging to enumerate all possible scenarios and develop formulas to describe them.
On the other hand, deep learning-based algorithms involves feeding sufficient data to the system, setting up a reward-punishment mechanism for the system’s correct or incorrect behavior, and gradually enabling the system to give the optimal solution in different situations. The downside of this approach is that the system learns to perform well under the given set of variables, but when unforeseeable safety issues arise, it is difficult to pinpoint the cause or to find a solution.
Given the complexity of the driving environment, relying solely on either of the above methods may not ensure the safety and comprehensive coverage of all driving scenarios.When it comes to the algorithmic research and development of cars and home, Lang Xianpeng proposed that in the future decision-making and planning, cars and home will adopt a humanoid approach to decision-making and research, allowing automatic driving to think like humans. It should ensure safety first, tolerate uncertainty, continuously self-evolve, balance short and long-term goals, and make timely judgments.
In terms of ensuring safety first, Cars and home’s idea is to establish rules for safety-related parts, such as the car cannot drive onto the curb or turn left into oncoming traffic. The engineers expressed these safety-related parts as mathematical formulas and developed mandatory rules. For driving comfort content unrelated to safety, they used deep learning methods to implement it. This approach could ensure safety-related parts’ control and flexibility related to comfort.
At the same time, in the design of certain decision-making algorithms, Lang Xianpeng hopes to consider more thoughtfully. Engineers consider long-term and short-term goals when making decisions. For example, when following a vehicle on a highway, deciding whether to turn left and pass or turn right depends on whether the vehicle will leave the highway from a nearby ramp. Decisions only become smarter when they have more comprehensive information.
In the overall plan, Lang Xianpeng told us that in terms of the core decision-making planning, the overall plan is to reduce the proportion of deep learning algorithms as much as possible gradually to form rules for some things that cannot currently be described. All of this is because autonomous driving cars are a safety-based product.
Regarding crucial data, Lang Xianpeng mentioned his thoughts on autonomous driving productization. Regardless of the data preparation for Cars and home’s first SUV or the training required for decision-making and planning algorithms, large amounts of real driving data are essential for autonomous driving product landing and a valuable resource for all enterprises. Lang Xianpeng emphasized the importance of data by stating, “Without data, all plans are just empty talk.”
Lang Xianpeng’s understanding of data importance comes from his past research and development experience. He once used an improved open-source algorithm code framework, and with a limited training dataset of fewer samples, he only achieved an 80%-85% recognition rate. However, with massive data training, it achieved a 97%-99% recognition accuracy rate, which matched or even exceeded the performance of some innovative algorithms in the research field with the same amount of data.
 In both scientific research and product development, data plays a crucial role. In the field of scientific research, a paper can be written with data spanning only 10 kilometers, while 100 kilometers is already a rich source of material. It is rare to see a scientific paper based on data spanning thousands of kilometers. “The amount of data required for scientific research is not even within the same realm as that needed for developing autonomous driving products,” said Lang Xianpeng.
In both scientific research and product development, data plays a crucial role. In the field of scientific research, a paper can be written with data spanning only 10 kilometers, while 100 kilometers is already a rich source of material. It is rare to see a scientific paper based on data spanning thousands of kilometers. “The amount of data required for scientific research is not even within the same realm as that needed for developing autonomous driving products,” said Lang Xianpeng.
This understanding has also made him realize the importance of data in the productization process. It is difficult for tech companies to find enough people to drive and test their products under real-world conditions to accumulate enough data. Hiring testers can provide plenty of data, but it’s challenging to avoid the homogenization of data. Different drivers have different driving habits and styles, not to mention the issue of broad geographic coverage.
Meanwhile, automobile manufacturers have the most substantial data resources and can combine diversity in data collection. There is a complete process for data expression, collection, and production in both car and home networks, ensuring that data can better fulfill the value of autonomous driving algorithm training. After the first SUV goes on sale, the backend will begin receiving driving and environmental data transmitted from the vehicle. According to Lang Xianpeng’s estimate, by 2021, there will be hundreds of billions of kilometers of data transmitted, which is already sufficient to support the development of autonomous driving algorithms.
In conclusion, Lang Xianpeng said at the end of his speech that the work of the autonomous driving team at CHJ Automotive has only just begun. Over the next 7-8 years, he hopes they can complete this task seriously. To a certain extent, the successful promotion of CHJ Automotive’s autonomous driving project will depend on the market performance of its first SUV. According to their plans, CHJ Automotive’s first SUV will be an extended-range electric vehicle with a range of over 700 kilometers. It is set to be released in the second half of this year and officially launched in 2019. With the launch of the new car and the transmission of data, Lang Xianpeng hopes that the research and development of CHJ Automotive’s autonomous driving will enter a faster development stage.
- The Future of NIO* Seven Questions to Baoneng Founder D.R. BRADLEY: Where Does the Confidence to Join the New Car Making Army Come From?

This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.