
Autonomous Driving: The Most Misunderstood Term
One end is the heat of venture capital. Over the past one or two years, the autonomous driving project has attracted a lot of financing. With the support of various capital sources, the technology is gradually permeating into various applications such as ports, mines, express delivery, logistics, and more.
The other end is the heat from the public. Earlier this year, Uber and Tesla’s autonomous driving accidents continued to occur. In cases of unexpected deaths of pedestrians and drivers, public doubts about autonomous driving reached historic highs.
Is it really time for autonomous driving to be applied in the market?
“At least four years are needed for L4 autonomous driving in passenger cars.” Dr. He Tao, founder of COWAROBOT, said in an interview.
“Although the public thinks that autonomous driving for passenger cars is perhaps just around the corner, the media’s exaggeration has led to high expectations. In fact, the mainstream opinion among academics and the industry is that L4 autonomous driving for passenger cars will take more than four years.”
At a time of public frenzy, Dr. He Tao’s words are much more sensible.
Dr. He Tao chose to apply autonomous driving in low-speed scenarios. As early as 2008, when he pursued his doctorate at the Tokyo Institute of Technology, his research topic was autonomous driving. At that time, he was under the guidance of the famous Japanese robotics master Hirose Shigeo and his main direction was the feature-driven global localization in autonomous driving.
Dr. He Tao mentioned that he participated in a joint US-Japan team experiment of crossing the United States for 100 kilometers without human driving between 2009 and 2010. Even after nearly ten years, there has been no significant breakthrough in the basic principles of autonomous driving.
“I am well aware of the historical evolution, and I must do something that can actually be applied to products.”
After deep research and contemplation, Dr. He Tao founded COWAROBOT in 2015 and invited Rolf Pfeifer, former director of the ETH Artificial Intelligence Laboratory, to join the company as its chief scientist. In addition, the company has received strategic support from CMU, and the two sides have launched joint research and development in the area of sensing algorithms for autonomous driving. The core team members of COWAROBOT come from CMU, Shanghai Jiao Tong University, Baidu, and other companies, with a luxurious background.
On April 24, 2018, COWAROBOT and Zoomlion jointly released the world’s first unmanned road sweeping and intelligent path-planning robot, which will be commercially available in Changsha, Wuhu, Hefei, Shanghai, and other places this year.
This unmanned sweeping car has already landed and is operating in Juzizhou Park in Changsha. Check out this recently filmed on-site video.“`html
After watching the video, I felt quite excited. Compared to landing projects such as ports and mining areas, street sweepers are closer to our daily lives and are vehicles that the public easily comes into contact with. To be honest, before visiting Dr. He Tao, I didn’t know that there were different types of street sweepers, and the one in Orange Island Park had a more lively and friendly appearance than the ones I usually see on the road.

42 Garage had an exclusive interview with Dr. He Tao about many questions regarding this street sweeper. In order to make the information in this exclusive interview more valuable, we will discuss the following topics:
-
The commercialization curve of innovative technology and the development stage of Kuwa.
-
The two completely different logical technologies in automatic driving commercial vehicles and the extension path of future technologies.
-
The core technology and commercial prospects of Kuwa’s latest unmanned street sweeper.
-
Kuwa’s next product plan.
Why choose a street sweeper?
Before answering this question, Dr. He Tao presented a rigorous logical thinking process.
The development of any technology will follow the technology maturity curve, also known as the technology cycle curve; Only when the technology maturity exceeds the market-acceptable trigger point can new technology go from the laboratory to commercial product deployment.
For example, the development of AI technology first had a big rise and fall and then started to rise again, which follows this development law. Before the trigger point is opened, the capital market will be optimistic about the development of new technologies. However, if it is not fulfilled in the long term, the attitude of the capital market will become negative.
To find a landing point in the market, either the technology must be powerful enough, or the application standards must be lowered. Finally, Dr. He Tao chose the two limiting conditions of automatic driving technology in application- low speed and closed scene.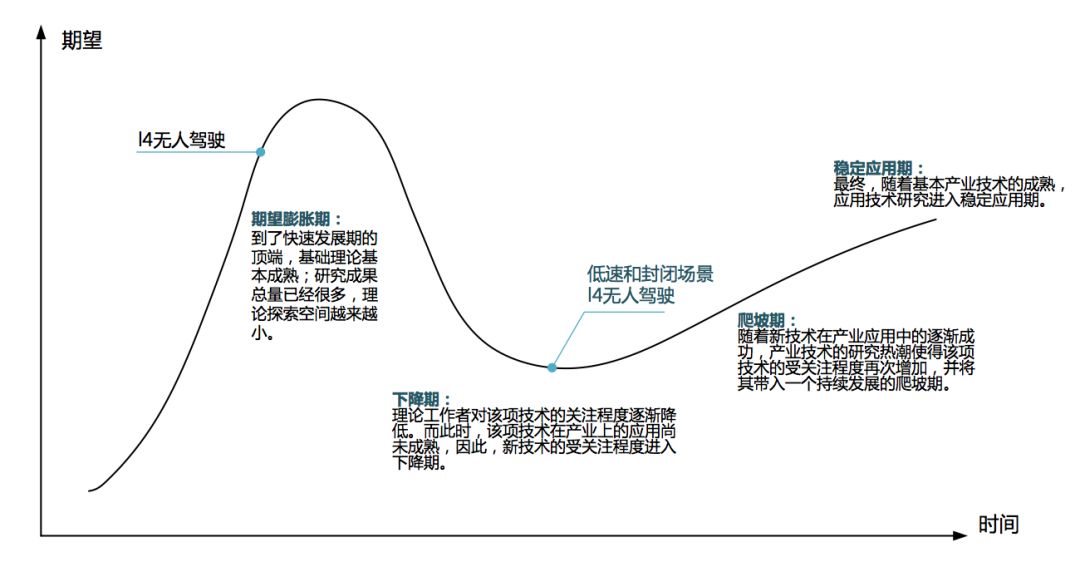
As shown in the figure above, L4 autonomous driving for passenger cars is currently in the first stage of the technology development curve, which is the expansion period. At this time, it is at the top of the rapid development period, the basic theory has been basically mature, and the theoretical exploration space is becoming smaller.
Autonomous driving for low-speed and closed scenarios, on the other hand, is in the beginning of the climbing period, the third stage. After the attention of theoretical workers to this technology decreases, new technologies begin to be applied in the industry and will go through a continuous climbing period, finally reach the stage of stable application.
Of course, one should choose scenarios that can be landed more quickly.
Delivery Robots Are the Most Difficult
However, even if the two restrictions of low speed and closed environment are selected, the choice of commercial landing scenarios is not over yet. Delivery, cleaning, and other fields all seem to be applicable areas.
Dr. He Tao does not believe so. He proposed two logical judgments on the scenario, one is the working environment, and the other is the moving vehicle.
In terms of the working environment, one aspect is the area, dimension, and dynamics of the environment. The other aspect is the motion attributes of the moving obstacles. The judgment of moving vehicles is the motion attributes and operating requirements of the vehicles.
Based on this judgment logic, Dr. He Tao scored all application scenarios on the market.
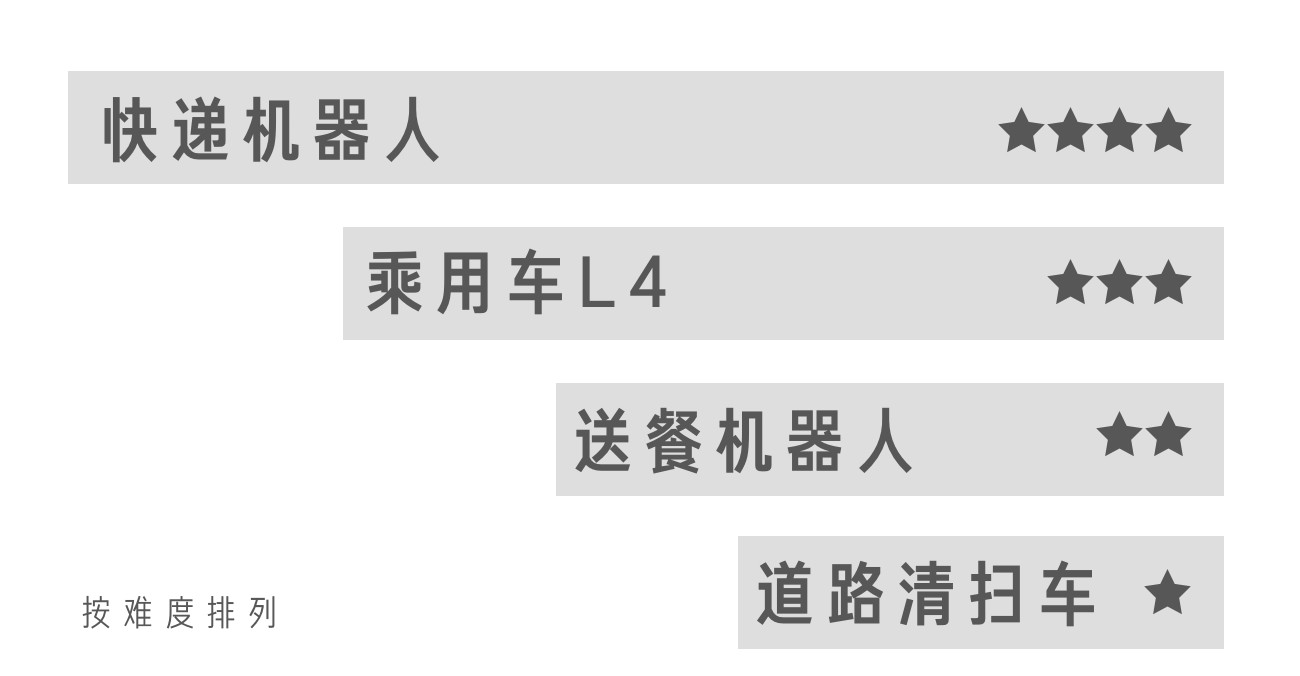
He found that delivery robots are actually the most difficult. The difficulty of delivery robots lies in the fact that the environment is extremely complex.
First of all, in terms of the area of the environment, delivery robots have to face a very large area. If you want to do the last kilometer of delivery, you have to cover the capillaries of the entire city. Dr. He Tao mentioned that even with high economic investment like Baidu, it can only achieve standard road scene map generation by 2020.
Secondly, from the perspective of the dynamics of the environment, this environment changes every day. The streets and alleys are being repaired or demolished at any time, and the changes in the environment must be updated in real time.
Finally, from the perspective of moving obstacles in the environment, there are no clear walking road rules for the streets and alleys of the city, and the environment and people are in a relatively disorderly walking state.
The second most difficult is L4 level autonomous driving for passenger cars in standard road scenes. The difficulty lies in the high speed and high safety requirements. Since it is a standard road scene, it will be more orderly than the scenario of a delivery robot.The third most difficult robot to develop is the delivery robot in restaurants. Although the restaurant environment is small, there are various types of people in the delivery environment, such as pregnant women, the elderly, and children, and the walking rules are in a chaotic state.
The last one is the floor-sweeping robot because of its low speed, it usually operates during less crowded evenings. At the same time, the area to be cleaned will be limited, so it can be deployed and planned in a more refined manner.
Of course, the second choice has been made by selecting the more popular mobile chassis robot. Before developing the floor-sweeping robot, COWAROBOT R1, a low-speed and automatic driving suitcase, had already been created and sold more than 5,000 units. Through the accumulated experience of the luggage project, COWA quickly entered the field of intelligent floor-sweeping robots.
Dr. He Tao mentioned that after the standard vehicle subsidy policy tightened, there has been policy-driven guidance towards electrification on special vehicles. Especially in the environmental sanitation industry that emphasizes “Beautiful China”, more attention is paid to environmental pollution issues. Environmental sanitation giants such as ZHL started working with chassis manufacturers to electrify their vehicles.
Although the essence is for environmental protection, it has inadvertently laid a sufficient foundation for the smart transformation of special-use vehicles.
The unmanned floor-sweeping robot released by COWA comes from cooperation with ZHL Environmental. As a new and emerging player in the unmanned driving industry, COWA Robotics cooperated with environmental sanitation industry leader ZHL Environmental for the first time, resulting in a powerful combination. ZHL Environmental provides the vehicle, while COWA is responsible for completing the front-end work of unmanned driving and intelligent operation with an integrated hardware and software system.
When we talk about the business landing route of innovative technologies, we often go through the process from the principle prototype of the product to the formal business product landing. The former may have a relatively smooth and simple implementation process, while the latter requires the innovation team to have very strong product landing capabilities. COWAROBOT quickly completed the verification stage of the principle prototype and entered the process of commercial product landing.


Dr. He Tao emphasized that this product is a robot with a mobile chassis positioned between factory AGVs (Automated Guided Vehicles) and unmanned driving passenger cars. Although both of them appear to be unmanned driving, their internal logic is completely different.Many companies use AGV for intelligent operations, but the biggest problem with AGV is that it is a technology dominated by control strategies that are relatively simple and pursue single optimization, which results in limitations for its use in dynamic and changeable environments.
Moreover, AGV’s computer does not need to identify and classify objects in the work environment. Therefore, the obstacles around the robot are classified as indistinguishable obstacle point clouds for the cognitive world of the robot.
For unmanned driving technology, it is necessary to perceive and recognize the work environment and the obstacles therein, classify, track and predict the moving trajectory of obstacles, plan reasonable local paths, and make some smart strategies.
In addition to unmanned driving, intelligent operation systems require strong product packaging capabilities. The Kewa team has a wealth of experience in robotics and automation, including multi-axis linkage control and can output a complete set of intelligent operation solutions from automatic recognition to unmanned driving.
When partnering with Zhonglian Environment, the two quickly reached an agreement.
Dr. He Tao further explained that there are three aspects to be considered for the cleaning operation, which are the engineering vehicles, cleaning devices, and the control of cleaning devices.
Kewa integrated the unmanned driving system and intelligent operation system, and accomplished three things: first, taking over the unmanned vehicle; second, integrating the control of the entire cleaning device; and third, optimizing the intelligent cleaning operation logic accordingly.
Unmanned driving is the mobile chassis of a sweeper truck, while robotics represents the intelligent operation system of a sweeper truck. Kewa’s goal is to systematize and intelligentize the entire sanitation process.
Kewa’s independently developed unmanned driving system
In the unmanned driving system, Kewa has independently developed a perception, planning, and positioning system, which includes an intelligent recognition system for unmanned driving, a decision and planning system, a feature-driven global positioning system, and a safety strategy that sets up multi-level anti-collision modules.
The unmanned driving hardware configuration of the sweeper truck integrates multiple sensors such as LiDAR, millimeter-wave radar, cameras, and ultrasonic radar to detect obstacles in real-time. In addition, there is a robust chassis motion execution strategy to cross or bypass obstacles.
For perception, because low-speed scenarios require sensor detection range smaller than that of high-speed scenarios, the sweeper truck uses a combination of three 16-line LiDARs, with camera vision as the main double-eye recognition and LiDAR as an auxiliary.
Finally, the sweeper truck can fully and autonomously complete limited area cleaning tasks, such as identifying roadside obstacles, sweeping along the roadside, S-shaped sweeping, and avoiding obstacles through images of the actual cleaning operation.






Global Positioning Based on Feature-Driven Approach
Also worth mentioning in the entire set of autonomous driving systems is the positioning technology of Kuwah. That is Global Positioning Based on Feature-Driven Approach.
Dr. He Tao began researching the problem of global positioning under autonomous driving conditions in 2008. He said that traditional map GPS is not suitable for positioning in closed environments.## Feature-driven global positioning
In simple terms, feature-driven global positioning refers to the recognition of objects by a vehicle, and the use of the object’s features and associated stored information to determine the vehicle’s current position.
For example, when you see the Eiffel Tower, you recognize it and can determine that it is located in a specific area of Paris, France. This process closely reflects human cognitive processes.
Feature-driven global positioning is based on visual sensing, including 2D and 3D depth sensing, and identifies and recognizes environmental features, using these features to determine a robot’s actual position in a global map.
In a closed environment, a self-driving sweeper first becomes familiar with its surroundings through perception, then extracts structured features based on that perception, segments and categorizes images, and finally stores and memorizes the environment.
In comparison to passenger cars, self-driving sweepers need to consider significantly fewer environmental features, such as identifying their path in relation to nearby obstacles, rather than analyzing the contents of a pile of garbage.
Furthermore, self-driving vehicles operating within sanctioned environments, especially those heavily trafficked by pedestrians, such as parks, indoor and outdoor plazas, or other such smart environments, cannot rely on GPS signals, as they may be blocked by buildings, trees, or other obstacles. Baidu’s technology suite, designed for conventional driving scenarios, is not suitable for these operating conditions.
Global positioning technology is a problem, particularly at low speeds or when operating self-driving vehicles. This technology will drive different companies down different development paths.
GPS-based global positioning is more suitable for the bulk of passenger vehicles, representing what is commonly referred to as horizontal development, as it charts a course for a more distant future.
Feature-driven global positioning technology, on the other hand, is better suited to weak GPS scenarios and relies instead on deep product development. Teams need to foster a more comprehensive approach to product development, in order to attain the necessary depth of expertise to create a more generalized product with stronger domain competence.
Commercial applications for self-driving sweepers
Ku Wa, a vendor of autonomous sweepers selling at around 700,000 RMB (approximately US$100,000), is aggressively marketing its product line. With an output of 45 KW of power, their sweeper is a diesel model. For comparison, imported sweepers can sell for over 600,000 RMB, while locally made models are typically priced between 100,000 RMB and 200,000 RMB.
What value can a self-driving sweeper provide to an industrial park?
A single self-driving sweeper can operate twice daily, replacing the work of two to three human laborers, with an average annual labor cost of 70,000 to 80,000 RMB per worker. Over the course of a year, this can translate to a savings of tens to several hundred thousand RMB. In addition, each sweeper can efficiently clean an area of 5,000 square meters, and boost workplace productivity.Currently, the unmanned sweeping vehicle has landed at Orange Island Park in Changsha, and trial work is also underway in the industrial park in Wuhu. By May or June, WowWee will deploy more fixed-road sweeping vehicles in cities.
From the era of manual sweeping 1.0, to the era of human-driven sweeping 2.0, to the era of unmanned sweeping 3.0.
According to the “2015 China Urban and Rural Construction Statistical Yearbook,” the overall market size of China’s environmental sanitation services will approach 170 billion yuan by 2020, with the road cleaning and sanitation service market size at 126.6 billion yuan, ranking first. Referring to the market size of road cleaning and sanitary services, the unmanned sweeping vehicle brought by WowWee Robotics represents a market size of billions of yuan from the perspective of replacing manual labor.
The core point of WowWee Robotics’ unmanned sweeping vehicle is to reduce labor costs and improve efficiency for road cleaning and sanitation services.
The Future of WowWee
As mentioned earlier, WowWee’s goal is to go deeper. Dr. He Tao mentioned that he would try to break through the categories of logistics and engineering vehicles.
Logistics is divided into three parts: front-end, mid-end, and back-end. The front-end refers to activities that occur in the warehouse, including unloading, sorting, warehousing, packaging, and output processes. The mid-end is the mainstream segment, referring to the transportation mainline. The back end of logistics refers to the last mile of delivery.
The difficulty level increases from the front to the back.
Currently, WowWee is preparing for the commercialization of the logistics front-end, and has been in talks with several well-known companies for cooperation. Dr. He Tao believes that for the mid-end segment, the more important aspect is the electrification of trucks, rather than replacing truck drivers with unmanned driving technology. As for the back-end segment of logistics, the difficulty level is too high at present and is not yet considered.
In addition to the unmanned driving team in the specialized vehicle field, WowWee also has a smart hardware team that plans to modularize the perception module and enter different C-end products. For example, they are currently in talks with leading baby stroller brands, applying the low-speed automatic driving technology that was previously on luggage to baby strollers. When parents carry their babies, the stroller will automatically follow behind, lightening their burden.
Furthermore, they will gradually provide corresponding components to empower AI technologies such as unmanned driving to consumer products, highlighting playability and educability.
WowWee currently has a research and development team in Shanghai with a size of over 70 people, and a team of over 100 people at the production base in Wuhu, primarily responsible for production and the supply chain.
WowWee’s two paths are very clear. One is the education market on the consumer end, which can generate a certain cash flow. The other is the vertical deep plowing of unmanned driving technology, constantly developing the core competitiveness of technology.The Coolwow team has a deep understanding of the industry, and their actions are steady and low-key. Before the product launch, they did not do any publicity in the media. From the completeness of the final product, it has reached a stage where it can be maturely applied in real scenarios.
The only concern is the price.
Dr. He Tao’s explanation for this is that the current cost of the vehicle mainly comes from the lidar and computing platform. However, in the future, with the expansion of the industry scale and the refinement of industrial division, lidar and computing platform related to autonomous driving will inevitably follow the road of the computer and mobile phone industry, showing a trend of gradual decline. So, the current cost is not the main constraint on commercial landing.
A black horse that has already broken through the siege has begun to show its arrogance.

-
General announced an investment of 100 million US dollars to produce the first autonomous vehicle with lidar

This article is a translation by ChatGPT of a Chinese report from 42HOW. If you have any questions about it, please email bd@42how.com.